

Simulation to Reality: Robots Now Train Themselves with the Power of LLM (DrEureka)
Analytics Vidhya
MAY 8, 2024
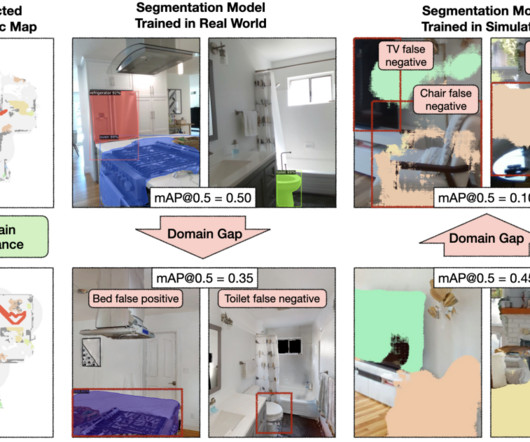
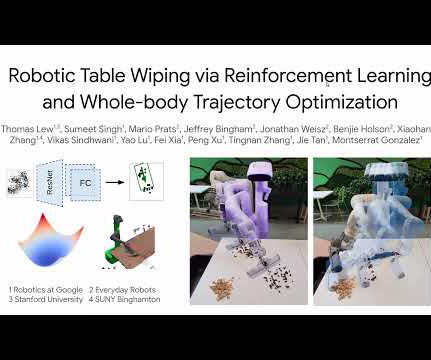
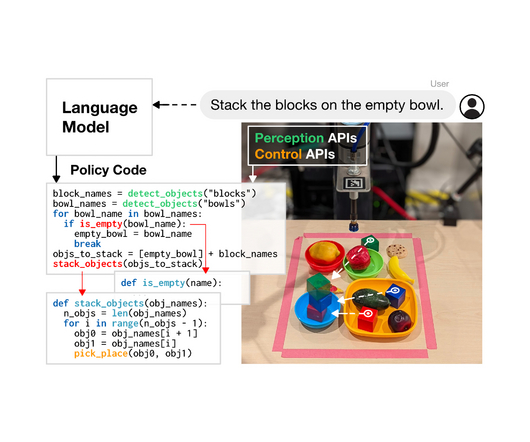
DrEureka is automating sim-to-real design in robotics. In robotics, sim-to-real transfer refers to transferring policies learned in simulation to the real world. It’s happening now!













Let's personalize your content