
Towards ML-enabled cleaning robots
Google Research AI blog
APRIL 7, 2023
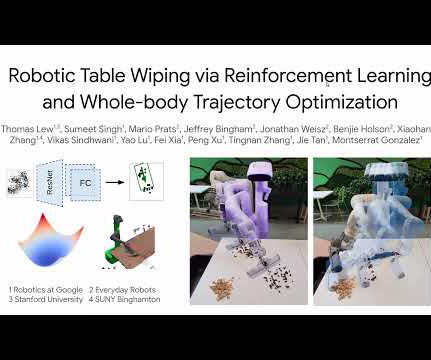
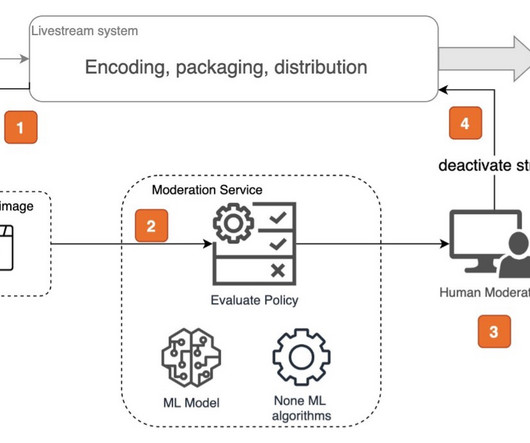
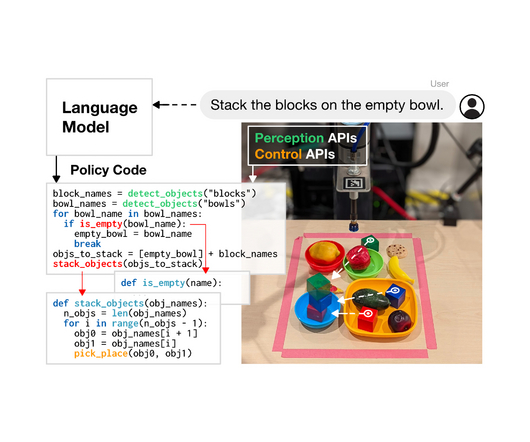
Combining the strengths of RL and of optimal control We propose an end-to-end approach for table wiping that consists of four components: (1) sensing the environment, (2) planning high-level wiping waypoints with RL, (3) computing trajectories for the whole-body system (i.e.,







Let's personalize your content