

Navigating to Objects in the Real World
ML @ CMU
JUNE 30, 2023
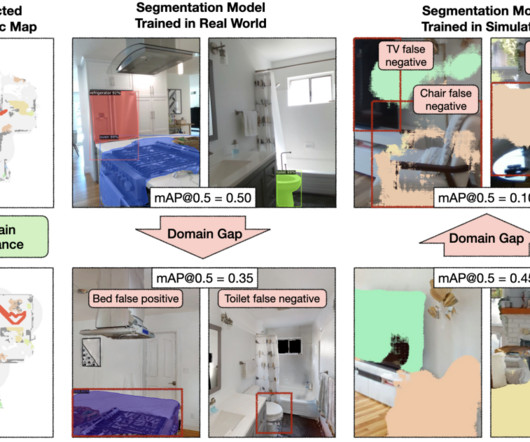
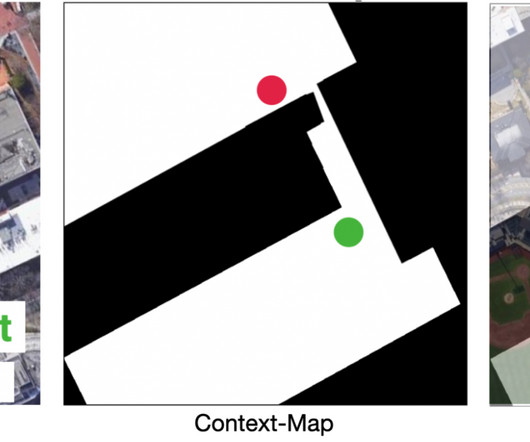
Empirical study: We evaluated three approaches for robots to navigate to objects in six visually diverse homes. Many learning-based approaches have been proposed in response to the lack of semantic understanding of the classical pipeline for spatial navigation. How well do different classes of methods work on a robot?





















Let's personalize your content